Design Optimization
The design optimization engine is at the heart of deFlex. Given a design space, loads, and constraints, it determines the optimal distribution of material — deciding where to place solid material and where to leave voids. Unlike shape optimization (which refines an existing geometry) or sizing optimization (which adjusts thicknesses), the solver starts from a blank canvas and discovers entirely new structural forms.
Why It Matters
Traditional mechanism design relies on an engineer's intuition: sketch a layout, simulate it, tweak dimensions, repeat. This works for simple problems but breaks down when the design space is complex or the performance requirements are tight. A human designer might explore a handful of candidate layouts. The solver explores the entire space of possible material distributions simultaneously, converging on designs that no human would intuitively propose.
For compliant mechanisms specifically, AI-driven design optimization is transformative. Compliant mechanisms achieve motion through elastic deformation rather than rigid-body joints, and the interplay between flexibility and stiffness makes manual design exceptionally difficult. The solver handles this balancing act automatically.
How It Works
The Big Picture
Imagine your design space divided into a fine grid of tiny cells — thousands or tens of thousands of them. Each cell gets a material value between 0 and 1:
- 0 means void (no material)
- 1 means solid (full material)
The solver's job is to assign material values to every cell such that the resulting structure best satisfies your objectives (maximize output displacement, optimize structural performance) while respecting your constraints (volume fraction, preserve regions, boundary conditions).
The Iterative Process
The optimization is not a one-shot calculation. It proceeds through iterations:
- Start with a uniform material layout (every cell at the volume fraction, e.g., 0.3)
- Analyze the current design using structural simulation to compute displacements and stresses
- Evaluate how the design can be improved
- Update the material distribution, respecting constraints
- Smooth the result to prevent artifacts and ensure manufacturability
- Repeat until the design converges
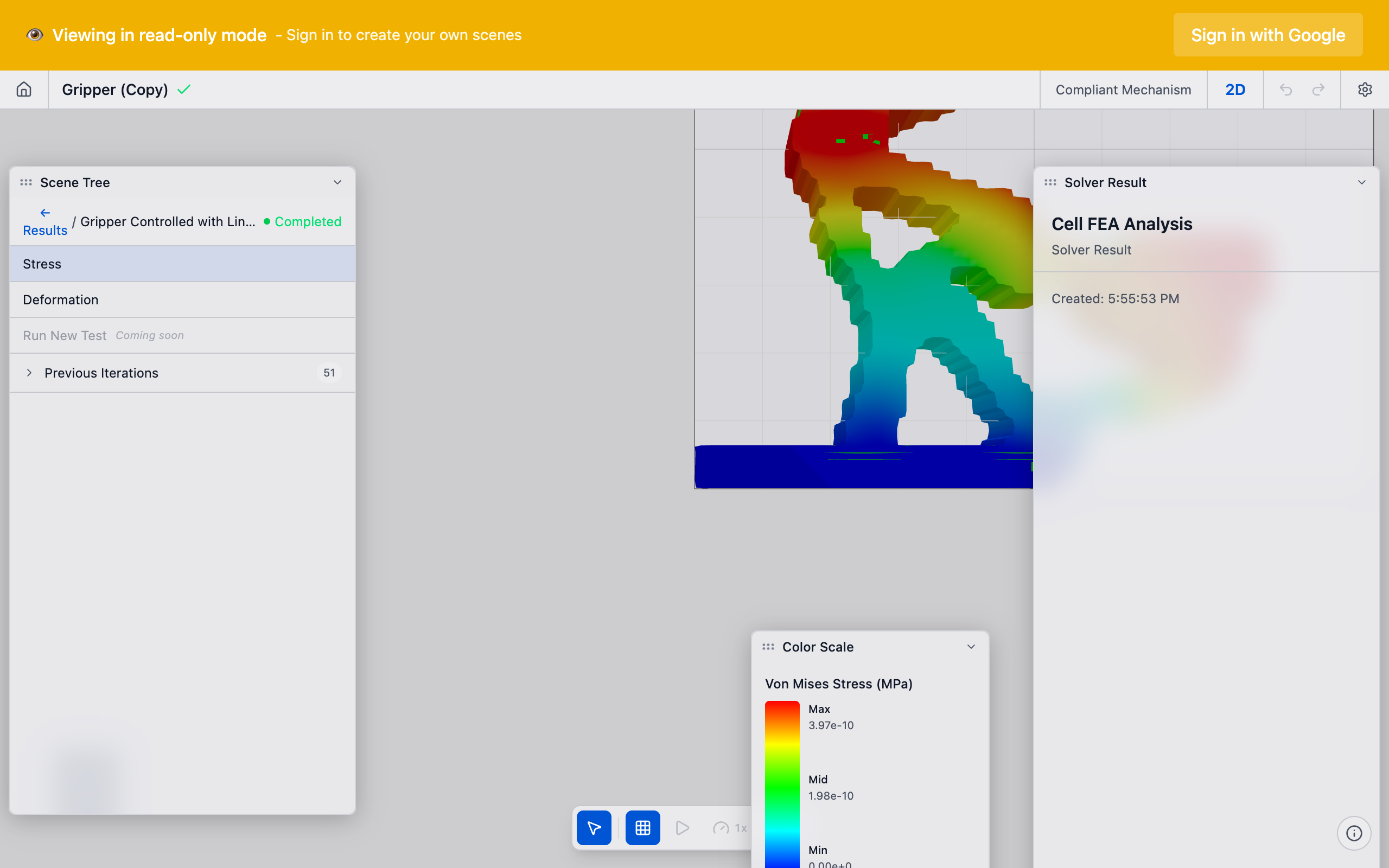
Each iteration refines the material layout. Early iterations produce blurry, indistinct shapes. As the solver progresses, material consolidates into crisp structural members with clear load paths.
You can watch this process in real time in deFlex's results viewer. The material layout updates after each iteration, so you can see the design emerge from the initial uniform field into a well-defined mechanism.
What the Solver Does
How material placement is determined
The solver uses a well-established, industry-standard approach. Each cell in the mesh gets a material value between 0 (void) and 1 (solid). The solver strongly favors clean, binary results — cells are pushed toward being either fully solid or fully empty, which produces manufacturable designs rather than fuzzy gray zones.
Intermediate values (gray regions) in the final result indicate areas where the solver is "undecided." A well-converged design should have very few of these. If you see large gray regions, consider increasing the mesh resolution or adjusting constraints.
Why you can trust the results
The optimization and analysis methods used in deFlex are the same approaches used in commercial and academic structural design tools worldwide. The solver:
- Efficiently handles tens of thousands of design values
- Applies smoothing to prevent numerical artifacts and ensure physically meaningful results
- Enforces all constraints (volume, stiffness, boundary conditions) rigorously at every iteration
- Converges to designs that are verified to satisfy your specified objectives
The results are not approximations or heuristics — they are rigorous solutions computed with real material properties, real structural analysis, and real constraint enforcement.
Smoothing and feature-size control
Raw optimization output can sometimes produce fine-scale patterns that are mathematically valid but impractical to manufacture. deFlex applies a design refinement filter:
- The filter radius parameter controls the minimum feature size in the result
- Larger filter radii produce smoother designs with thicker structural members
- Smaller filter radii allow finer features but may produce more complex geometries
What the solver optimizes
For compliant mechanism design, the solver:
Maximizes the output displacement at the output preserve in the specified direction
Subject to:
- Volume constraint: total material must stay within your volume fraction budget
- Stiffness coupling between paired input and output preserves
- Preserve regions remain solid
- All cells stay within valid material bounds
The solver balances two competing demands: the mechanism must be stiff enough to transmit force from input to output, yet flexible enough to deform and produce the desired output motion. This inherent trade-off is what makes compliant mechanism design challenging — and what the optimizer handles elegantly.
Practical Implications
Understanding the optimizer helps you set up better problems:
- More cells = better resolution but longer solve times (cost scales roughly with cell count)
- Volume fraction directly controls the material budget — lower values force the optimizer to be more creative
- Preserve placement gives the optimizer its boundary conditions — poorly placed preserves can lead to degenerate designs
- Convergence typically occurs within 50-200 iterations for well-posed problems
If the solver produces unexpected results, the issue is almost always in the problem setup — not the optimizer. Check your preserve placements, directions, and the volume fraction before adjusting solver parameters.
See Also
- Compliant Mechanisms — what the optimizer is designing
- Design Space — the region the optimizer works within
- Volume Fraction — the material budget constraint
- Convergence — how to tell when the solver is done
- Results Interpretation — reading the design result output